- ¿Qué son las intervenciones robóticas guiadas por imágenes?
- ¿Cuáles son las ventajas de procedimientos mínimamente invasivos?
- ¿Cuáles son algunos ejemplos de intervenciones robóticas guiadas por imágenes y cómo se usan?
- ¿Qué están desarrollando los investigadores financiados por el NIBIB en el área de intervenciones robóticas guiadas por imágenes para mejorar la atención médica?
¿Qué son las intervenciones robóticas guiadas por imágenes?
Las intervenciones robóticas guiadas por imágenes son procedimientos médicos que integran tecnologías de robótica e imágenes sofisticadas, principalmente para realizar cirugías mínimamente invasivas. Este enfoque de tecnología integrada ofrece diferentes ventajas, tanto para los pacientes como para los médicos.

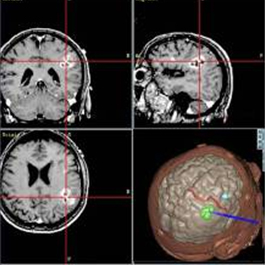
Imágenes: En los procedimientos guiados por imágenes, el cirujano se guía por imágenes de varias técnicas, incluyendo la resonancia magnética (RM) y el ultrasonido. Las imágenes también se pueden obtener usando cámaras diminutas adheridas a sondas que son lo suficientemente pequeñas para caber dentro de una incisión mínima. La cámara permite que se realice la cirugía utilizando una incisión mucho más pequeña que en una cirugía tradicional.
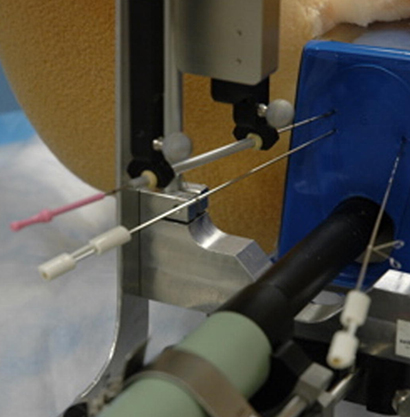
Robótica: Las manos del cirujano y las herramientas quirúrgicas tradicionales son demasiado grandes para las incisiones pequeñas. En cambio, las herramientas robóticas delgadas, en forma de dedo, se utilizan para realizar la cirugía. Mientras que el cirujano observa la imagen en la pantalla, se utiliza un telemanipulador para transmitir y dirigir movimientos de la mano y de los dedos a un robot, el cual se puede controlar por medios hidráulicos, electrónicos, o mecánicos.
Las herramientas robóticas también se pueden controlar por computadora. Una ventaja de un sistema computarizado es que un cirujano podría potencialmente realizar una cirugía desde cualquier parte del mundo. Este tipo de cirugía a larga distancia actualmente se encuentra en fase experimental. Los experimentos ilustran el potencial para salvar vidas cuando una operación delicada requiere de un cirujano especialmente capacitado que está en un lugar distante.
Además, los doctores pueden usar las intervenciones robóticas guiadas por imágenes para localizar tumores con mayor precisión cuando realizan biopsias y tratamientos de radiación.
¿Cuáles son las ventajas de procedimientos mínimamente invasivos?
La cirugía mínimamente invasiva puede reducir el daño a los tejidos sanos circundantes y disminuir así la necesidad de medicamentos para el dolor y reducir el tiempo de recuperación de los pacientes. Para los cirujanos, las intervenciones robóticas guiadas por imágenes también tienen la ventaja de reducir la fatiga durante operaciones largas, permitiendo al cirujano realizar el procedimiento estando sentado.
¿Cuáles son algunos ejemplos de intervenciones robóticas guiadas por imágenes y cómo se usan?
Prostatectomía robótica: La extracción completa de la próstata se realiza a través de una serie de pequeñas incisiones, a diferencia de una sola incisión grande de 4 a 5 pulgadas como en la cirugía tradicional. Las pequeñas incisiones resultan en una recuperación postoperatoria más corta, menor cicatrización y un regreso más rápido a las actividades normales.
Técnicas de ablación para cánceres en etapa temprana: Los pacientes con cáncer de riñón en etapa temprana se pueden tratar con procedimientos mínimamente invasivos para destruir tumores pequeños. La crioablación utiliza el frío como fuente de energía para destruir los tumores. Los doctores utilizan imágenes de tomografía computarizada (TC) y ultrasonido para colocar una sonda, en forma de aguja, dentro de cada tumor renal. Una vez en posición, la punta de la sonda se súper-congela para encerrar el tumor en una bola de hielo. Ciclos alternos de congelación/descongelación matan las células del tumor. Otros métodos mínimamente invasivos para destruir cánceres de riñón en etapa temprana incluyen el calentamiento y la extracción quirúrgica de las células del tumor utilizando un dispositivo robótico. Muchos pacientes pueden volver a casa el mismo día y son capaces de realizar actividades normales dentro de varios días.
Ortopedia: Los procedimientos robóticos guiados por imágenes están mejorando la precisión y el resultado de varios procedimientos ortopédicos. Por ejemplo, las cirugías de reconstrucción parcial de rodilla se enfocan en localizar solamente las secciones dañadas de la articulación de la rodilla. Los cirujanos ortopedistas están combinando el uso de un brazo quirúrgico robótico y cámaras de fibra óptica en dichos procedimientos, lo que resulta en pacientes que retienen más de su tejido sano normal. Los procedimientos robóticos guiados por imágenes también mejoran los reemplazos totales de rodilla, permitiendo una alineación y colocación precisa de los implantes de rodilla. El resultado es una función más natural de la rodilla, mejor rango de movimiento y un mayor equilibrio para los pacientes.
¿Qué están desarrollando los investigadores financiados por el NIBIB en el área de intervenciones robóticas guiadas por imágenes para mejorar la atención médica?


Guía de agujas asistida por robot ayuda en la extracción de tumores hepáticos: La ablación por radiofrecuencia (RFA, por sus siglas en iglés) es un tratamiento mínimamente invasivo que destruye tumores con calor y que puede ser una opción para salvar vidas de pacientes que no son candidatos a cirugía. Sin embargo, el uso amplio de la RFA se ha limitado debido a que las trayectorias rectas que toman las agujas que llevan los electrodos para destruir tumores pueden dañar los pulmones u otros órganos sensibles. Además, los tumores grandes requieren múltiples inserciones de aguja, lo cual aumenta el riesgo de sangrado. Para abordar el problema de daño al tejido usando agujas rectas, los investigadores apoyados por el NIBIB están desarrollando agujas altamente flexibles que pueden ser guiadas por trayectorias curvas y controladas a través del tejido, permitiendo la extracción de tumores que no son accesibles por una trayectoria en línea recta. La tecnología combina la flexibilidad de la aguja con un sistema de guía de ultrasonido 3D que permite al médico corregir la trayectoria de la aguja para evitar obstáculos inesperados mientras la aguja avanza hacia el tumor. El dispositivo aumentará la precisión y reducirá el daño a tejido sano durante la extracción de tumores, resultando en una utilización mayor de la tecnología y mejores resultados en los pacientes.
Cápsula ingerible identifica y obtiene biopsia de tejido anormal en el esófago: El esófago de Barret es una condición precancerosa que requiere de biopsias repetidas para monitorizar el tejido anormal. Los investigadores apoyados por el NIBIB están desarrollando un dispositivo ingerible del tamaño de una píldora para mejorar el manejo y el tratamiento de esta condición. Un paciente sin sedación puede tragar fácilmente la píldora, la cual está unida a una atadura delgada hecha de cable y fibra óptica. El dispositivo detecta zonas microscópicas del esófago que pueden mostrar evidencia de la enfermedad, y utiliza un láser para recoger muestras del tejido sospechoso—una tecnología conocida como microdisección asistida por láser. El médico entonces retira sin molestias el dispositivo del paciente y las micro-muestras recogidas son examinadas para evidencia visual de la enfermedad, así como para el análisis genético. Este dispositivo mínimamente invasivo mejora la comodidad del paciente y proporciona un perfil molecular preciso de las regiones donde se obtuvo biopsia, lo cual ayuda al médico a controlar y tratar el trastorno.