Para reparar huecos en la mácula del ojo, el área responsable de la visión central clara, los oftalmólogos deben remover una membrana que es más delgada que una envoltura plástica. Movimientos o temblores involuntarios pueden traumatizar el tejido adyacente y causar miles de complicaciones. Una reducción significativa de temblores permitiría a los cirujanos mejorar su precisión, así como la seguridad de los procedimientos quirúrgicos.
A pesar de que los temblores no son perceptibles a simple vista, estos ocurren en la punta de los instrumentos de microcirugía cuyo diámetro mide entre 0.5mm y 0.9mm, menos del grueso de un cabello humano. Un equipo de investigación en la Universidad de Carnegie Mellon, dirigido por el Profesor Asociado en Investigación Cameron Riviere, ha desarrollado un instrumento totalmente portátil que elimina casi por completo estos temblores.
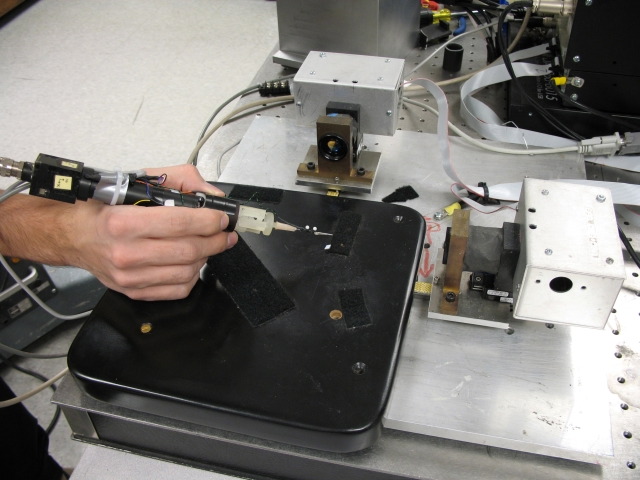
El micromanipulador utiliza un sistema de filtrado y rastreo óptico para controlar movimientos no deseados. El sistema de rastreo óptico captura señales de dos pequeños diodos de emisión de luz (LEDs) en la punta del instrumento y las remite a dos sensores de posición que filtran y procesan las señales en dos rutas paralelas. El sistema detecta su propio movimiento, distingue entre movimiento deseado y no deseado, utilizando técnicas de filtrado avanzadas, y desvía su propia punta para compensar el movimiento no deseado.
“En teoría este [micromanipulador] podría convertirse en el instrumento estándar para ciertos procedimientos de alta-precisión”, dice Riviere, quien planea empezar pruebas en vivo en modelos animales el próximo año y espera que el aparato esté listo para trabajo clínico dentro de 5 años.
Abriendo Nuevas Oportunidades Quirúrgicas
A pesar de que varios campos de microcirugía, como la neurocirugía y la cardiología, se podrían beneficiar al adoptar el micromanipulador, el campo de la cirugía de ojos será muy probablemente el primero en utilizar este aparato. “Nos estamos enfocando en los ojos porque es ahí donde existe más demanda clínica”, dice Riviere. Las delicadas estructuras del ojo y su red tan rica de vasos sanguíneos, dificultan a los cirujanos el tratamiento de ciertas condiciones de la retina usando la tecnología actual.
Por ejemplo, es esencial remover los coágulos de sangre que se forman en la retina para mantener la vista. Se han hecho intentos clínicos para romper los coágulos, pero “por lo general no es factible hoy en día para la mayoría de los cirujanos”, dice Riviere. El procedimiento requiere que un cirujano de ojos inyecte un medicamento para disolver coágulos dentro de los pequeños vasos de la retina. “El vaso se puede rasgar a causa del temblor de manos [del cirujano]”, explica Riviere. El nuevo instrumento permitirá que el cirujano manipule los vasos con la precisión de un robot y la facilidad de una sencilla herramienta portátil.
Otro procedimiento de retina implica remover el tejido de cicatriz. “Remover el tejido de cicatriz de la retina es como quitar cinta adhesiva de la superficie de una mesa con pinzas del tamaño de una aguja de coser”, dice James Handa, Jefe Asociado de la División de Retina en la Universidad de Johns Hopkins, quien ha utilizado este instrumento en un laboratorio. “Muchas veces el tejido de cicatriz es casi invisible por lo que la destreza es extremadamente importante”, dice él. El instrumento permitiría a los cirujanos sujetar firmemente el tejido de cicatriz y removerlo. Tiene además el potencial de mejorar el factor de seguridad de cada cirugía, dice Handa.
Debido a que la tecnología actual no permite a los oftalmólogos explorar por debajo de la superficie de la retina, una de las pocas opciones para el tratamiento de melanoma en los ojos es la quimioterapia global aplicada directamente al ojo. Los medicamentos altamente tóxicos pueden dañar las sensibles estructuras del ojo. Sin embargo, el micromanipulador permitiría a los cirujanos abrir vasos sanguíneos que alimentan el tumor e inyectar quimioterapia en altas dosis directamente en los vasos. Este método localizado protegería las estructuras sensibles del ojo.
Otra vía más donde el micromanipulador podría hacer una diferencia es en procedimientos de movimiento repetitivo como el escaneo con láser, dice Louis Lobes, Profesor Clínico Asociado de Oftalmología en la Escuela de Medicina de la Universidad de Pittsburgh, quien ha trabajado en el proyecto con Riviere.
Actualmente, los cirujanos de ojos utilizan tratamientos de láser modelados [de patrones repetitivos] para sellar las lágrimas de la retina y prevenir un recrecimiento anormal de vasos sanguíneos en retinopatía diabética. En este último caso, un cirujano apunta un láser y presiona un pedal para activar un pulso de luz. El cirujano podría necesitar dirigir la sonda para activar hasta 1,500 pulsos dirigidos individualmente por toda la retina, pero a menudo los cirujanos se sienten fatigados después unos 600 pulsos. Con el software del micromanipulador, los cirujanos podrían simplemente apuntar el láser hacia el centro de un modelo preprogramado, activar el pedal, y automáticamente el instrumento haría un escaneo del modelo.
No Sólo Para CirugíaAdemás de aplicaciones quirúrgicas, el micromanipulador podría ayudar a biólogos especialistas en células. “Biólogos del desarrollo hacen mucha microcirugía con células individuales. Tratan de cortar pedazos de células e inyectar material en ellas”, dice Riviere. “Puedes hacerlo a mano, pero podrías dañar la estructura. La escala no es muy diferente del intentar canalizar [abrir] los vasos de la retina”. Los biólogos especialistas en células actualmente trabajan con un sistema grande que se coloca sobre un tablero de mesa, con una palanca que controla ciertos movimientos de la herramienta. “El micromanipulador ofrece versatilidad de manejo a mano, no disponible con el tablero de mesa”, dice Riviere, haciendo notar que los investigadores pueden sujetar su prototipo como a un lápiz. |
Donde Ningún Cirujano Ha Ido Antes
El diseño compacto del micromanipulador, de costo relativamente bajo – como de $1,000 dls – y de uso fácil, podría dar al instrumento una ventaja sobre sistemas grandes de cirugía asistidos por robot. El instrumento trabaja desde un computador personal y es portátil como los instrumentos pasivos de microcirugía actuales. Tiene además la habilidad de ser apagado y operado como instrumento pasivo, si así lo requiere la condición de un paciente.
El potencial del micromanipulador se ve afectado por unos cuanto desafíos técnicos restantes, que Riviere y su equipo deben resolver. Estos incluyen el reducir el tamaño del manipulador, mejorar su rango de movimiento para que pueda girar 360º, y convencer a los cirujanos que usen el aparato.
“El mayor impedimento es cambiar la mentalidad”, dice Handa. “Muchos cirujanos dirán, ‘¿Quien necesita eso?’”, pero ambos, Handa y Lobes, opinan que el aparato mejora sus habilidades quirúrgicas. “Lo que hace esto es mejorar la habilidad del cirujano para realizar procedimientos cada vez más finos”, dice Lobes. “La cirugía es en gran parte acerca de acción y reacción. El poder neutralizar el temblor de manos le da al cirujano mayor confianza en sí mismo”, añade Handa. “Esto le permitiría a los cirujanos comunes convertirse en cirujanos sobresalientes y talentosos, e ir a lugares que nunca antes han visitado”.
Este trabajo está apoyado en parte por el Instituto Nacional de Bioingeniería e Imágenes Biomédicas (NIBIB) y por el Instituto Nacional de los Ojos (NEI).
Referencias
MacLachlan RA, Choi DY, Lobes LA, Riviere CN. Compensation of tremor by an active handheld micromanipulator. IEEE Transactions on Robotics. In press.
MacLachlan RA, Riviere CN. Optical tracking for performance testing of microsurgical instruments. Pittsburgh, PA: Robotics Institute, Carnegie Mellon University. Pa. Tech. Rpt. CMU-RI-TR-07-01, 2007 Jan.
Riviere CN, Gangloff J, De Mathelin M. Robotic compensation of biological motion to enhance surgical accuracy. Proc IEEE. 2006;94(9)1705-16.