Collaborators
Project Brief
We are developing a second-generation software system for image-based robotic automation of micromanipulators, which entails seamless integration and control of combined optical-mechanical systems used for NINDS biological investigation.
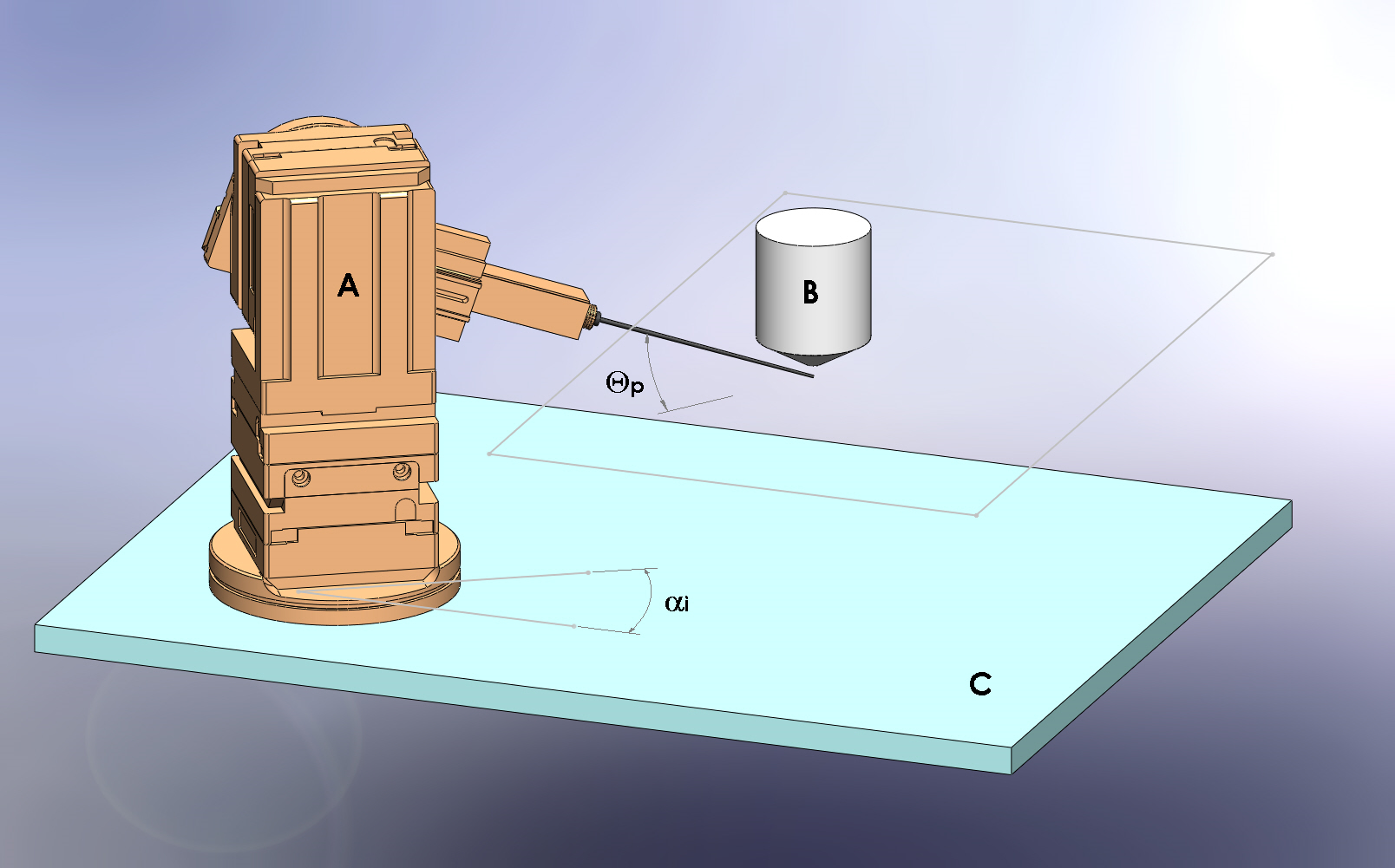
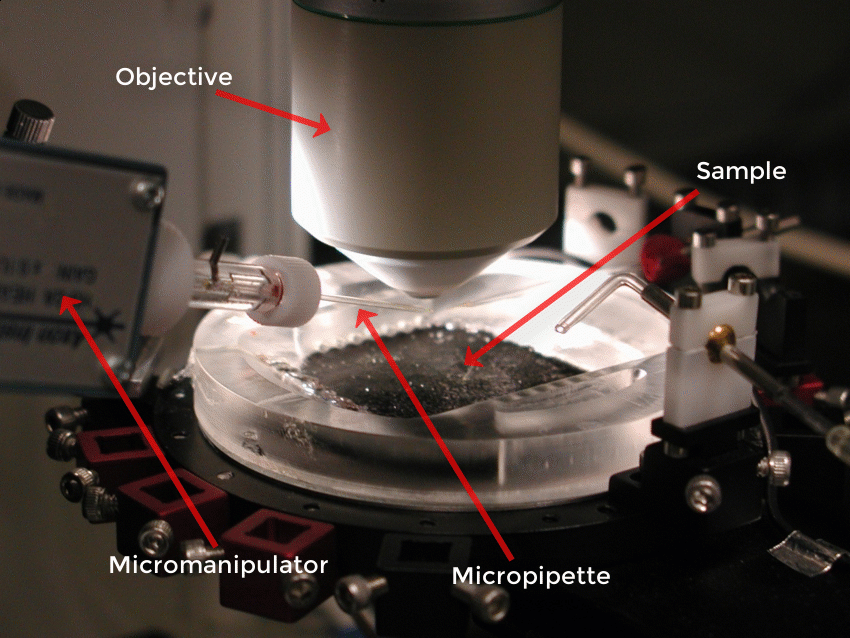
This custom hardware and software system enables the automatic 3D targeting of structures in living biological tissues, observed under a microscope objective lens, by an investigator interacting directly with a real-time image. A system development goal is to achieve precision positioning of micro tools, such as electrodes or other probes, to targeted structures. The system allows an investigator to simply point-and-click on a structure of interest in an acquired image, which then activates the manipulator-controlled movement of the micro tool to the selected image point(s). This is achieved by performing algorithmic transformations between image space, optical space, and mechanical space coordinates.
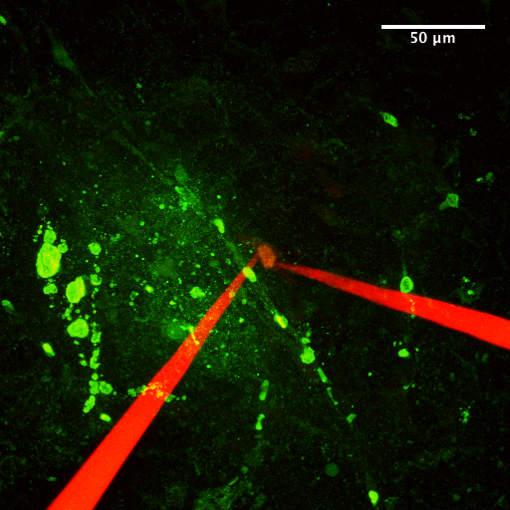
This project will extend the functionality of TargetX, the first-generation prototype that demonstrated feasibility of these innovative targeting methods by controlling the movements of several commercially available multi-axis micromanipulator systems. The second-generation system, utilizing custom software developed with National Instruments LabVIEW, enables 3D targeting based on images acquired from combined multi-photon and spectral confocal laser scanning microscope systems. Furthermore, the targeting system capabilities have been expanded by enabling the use of additional common micromanipulators, from other manufacturers, not currently supported by TargetX. The new targeting system has been tested for applications in neuroscience involving targeting of neurons or neuronal substructures in living tissue such as rodent brain tissue slices and en bloc spinal cord isolated in vitro, which are neurobiological preparations employed by NINDS investigators.
Over the past two decades there has been a rapid convergence of imaging and positioning technologies in diverse areas of biomedical sciences. Positioning systems have advanced from the classical macro-stereotaxic systems, to precision multi-axis motor-driven micromanipulators, to computer-controlled positioning down to the nanoscale. Simultaneously, imaging technologies available for visualizing living biological materials have advanced dramatically to modalities with varying levels of spatial resolution including MRI, real-time video-microscopy, and confocal and multi-photon laser scanning microscopy. Increasingly, these imaging modalities and positioning control at corresponding levels of spatial precision are being integrated for a wide range of applications in basic and clinical sciences. At the same time, most current approaches for working with micro tools under the microenvironment of an objective lens are still awkward and limiting. Our innovative approach of automated integration of imaging with robotic control of micro tools would substantially alleviate many challenges, and opens the door for new and easier ways of simultaneously visualizing, probing, and manipulating living biological materials. Such as system would potentially benefit many applications in medicine and research whenever tools are brought to or taken away from locations in a biological specimen, including in intact structures in vivo such as the exposed brain.