
MRI and surgical robots find common ground
What are two things that MRI machines and robots have in common? They are both powered by magnets, and neither can function properly if the other is in the room.
MRI machines use some of the strongest magnets in the world to tug at the water molecules and tissues in the body which results in the release of photons that create MRI images. Robots are powered by motors that consist of steel cores surrounded by magnets that guide precise movements.

A conventional robot in the same room with an MRI machine would fly across the room into the machine because of the magnetic pull on the metal parts of the robot’s motor. Thus, using MRI to guide medical robots performing delicate surgical procedures such as a biopsy has been problematic. In addition, when attempting to use MRI images to guide non-robotic procedures, surgeons are faced with very limited mobility and access in the small space the patient occupies inside the typical MRI machine.
And so, the hope of using MRI imaging to guide medical procedures has been fraught with seemingly unsolvable problems, which caught the attention of Lorne Hofstetter, PhD, who is currently completing an MD at the University of Utah.
Hofstetter began his engineering career as a teenager using small motors to control the flaps of his model airplanes. His interest in expanding the use of MRI during medical procedures led him to the laboratory of Dennis L. Parker, professor in the department of radiology and imaging sciences at Utah. Parker’s laboratory was known for its work using MRI to guide ablation of breast tumors using high intensity ultrasound—a procedure not affected by the magnets of the MRI.
“I had seen a talk several years ago where the investigators were working on using the MRI magnets to power wireless imaging coils,” says Hofstetter. “It reminded me that magnets needed to power electric motors were already available in the MRI machine.”
With Parker and other researchers at Utah, Hofstetter built a motor that could operate a robotic device made from non-magnetic materials and was powered by the magnetic field produced by the MRI. The design involved replacing all the magnetic parts of a normal electric motor with non-magnetic components. This included the steel cover that encloses the motor, the motor magnets set permanently around the perimeter, and the rotor that spins in response to electromagnetic signals.
To test the new motor in the MRI machine, it was incorporated into a robot with a single, remotely-controlled surgical arm. The team outfitted the arm with a biopsy needle. They placed the small robot in an MRI machine and tested both the ability of the robotic arm to perform its tasks and the MRI to produce clear images in the presence of the robot. There was a concern that even if the robot could function, it would likely create electromagnetic “noise” that would spoil the MRI images.
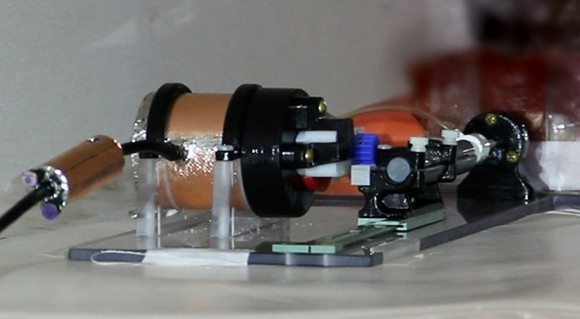
However, the experiment worked perfectly. The robot was able to extend the biopsy needle into the experimental tissue to an exact target spot that could clearly be seen on the MRI image. The needle was then withdrawn—mimicking the retrieval of a patient sample.
“Lorne is an extremely talented and thorough scientist,” said Parker. “He solved the problem of electromagnetic noise spoiling the MRI images by surrounding the small motor with copper, which absorbs any electromagnetic interference that is generated.”
Hofstetter got that idea from the fact that MRI rooms are lined with copper to block any outside radio waves from interfering with the MRI images.
“The work by the Utah group is an excellent example of impactful bioengineering,” says Guoying Liu, Ph.D., Interim Director for the Image-Guided Interventions Program at the National Institute of Biomedical Imaging and Bioengineering, which supported the project. “It is an important step towards using the remarkable images created with MRI to guide delicate surgical procedures.”
Hofstetter and colleagues are now working to build a more sophisticated robot, with arms that have a wider range of movement. The initial clinical target for the technology is neurosurgery where the precision of an MRI-guided robotic arm would be paramount in the accurate placement of electrodes used for deep brain stimulation.
-Written by Thomas Johnson, Ph.D.
The study appears in the journal Communications Engineering1. The work was funded by the National Institute of Biomedical Imaging and Bioengineering, the National Cancer Institute, the NIH Office of the Director, and the Mark H. Huntsman endowed chair.