
Navigating the labyrinthine vasculature of the brain with standard surgical instruments can be incredibly challenging, even for the steadiest of hands. But with some robotic assistance, brain surgeons could potentially operate with far greater ease.
Researchers at Johns Hopkins University and the University of Maryland have laid the groundwork for a soft robotic tool and control system that could grant surgeons an unprecedented degree of maneuverability within the brain. A recent study published in the International Journal of Computer Assisted Radiology and Surgery demonstrates that the new system is both intuitive and highly accurate. The early results suggest that, with further development, the robot could one day speed up and improve the efficacy of minimally invasive surgeries for life-threatening brain aneurysms and other serious conditions.
One of the common approaches for treating a brain aneurysm — a weakened blood vessel that bulges and fills with blood — involves threading a plastic tube called a catheter through an artery, typically in the groin, with the goal of reaching and sealing off the aneurysm without causing any perforations along the way.
To address the twists and turns of the vasculature, physicians can bend the tips of the catheters in a desired direction before inserting them. Then using their hands, they rotate the catheter as needed while pushing it toward the aneurysm. But this approach comes with a significant drawback.
“With normal catheters, you can’t bend the tip in a different direction on demand once it’s inserted which causes trouble if an aneurysm is hard to reach,” said study co-author Ryan Sochol, Ph.D., a professor of mechanical engineering at the University of Maryland. “This particular problem appears to be quite consistent among neurosurgeons and others that perform endovascular interventions.”
After hearing from neurosurgeons and studying surgical procedures, the authors of the new study concluded that a steerable robotic tool could greatly improve the process.
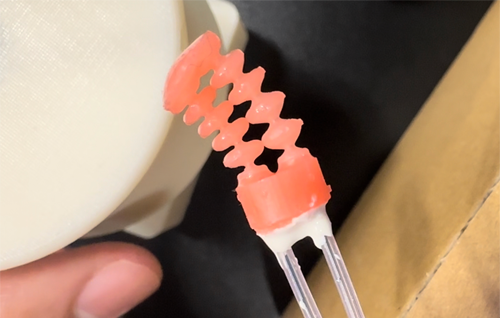
The researchers designed an air pressure operated — or pneumatic — catheter tip which they 3D printed using a soft and flexible resin. The design includes two hollow channels running in parallel along the length of the tip, which, if pressurized individually, causes the tip to deflect to either the left or the right.
While the catheter tip itself was inspired by existing designs, the authors sought to address a need that those previous robotic systems had not yet tackled — a control system that would fit well into the current clinical workflow.
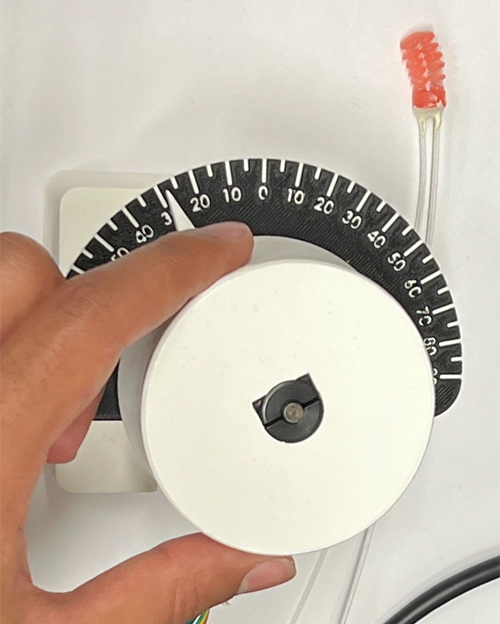
To provide physicians with a similar but improved method, the team developed a hand dial that allows for precise adjustments of the tip’s position, providing more control than rotating a pre-bent tip. Additionally, the dial offers haptic feedback that indicates when the tip is bent. With this system, the researchers grant the ability to simultaneously move a catheter forward with one hand while adjusting the angle of the tip with the other.
To assess the device’s performance, the authors had two users — a skilled neurosurgeon and another with no prior surgical training — adjust the robotic tip’s position to hit an array of five 2-millimeter-wide cylindrical targets spaced less than 2 millimeters apart.
Through 80 trials each, the users drove the catheters toward the cylinders with one hand and operated the dial with their other, bending the tips even closer to each target.
The authors tracked how far off the tips were from the targets and the time it took the users to accomplish the tasks. The surgeon was clearly faster and more accurate, however, after several trials, the novice began closing the gap, almost matching their counterpart’s accuracy.
“Both users were able to use the robotic system for sub-millimeter precision control, which is smaller than the two-millimeter diameter of brain vessels and the openings of aneurysms in the brain,” said senior author Axel Kreiger, Ph.D., a professor of mechanical engineering at Johns Hopkins University. “Overall, it was really nice to see that the results support the feasibility of the system.”
With the study putting more wind in their sails, the authors are eager to continue developing the robotic tool with plans to shrink it to a more clinically relevant size and test it against targets in more anatomically accurate environments, Krieger explained.
In the future, the authors also intend to increase their design’s functionality by adding tips in series, which could allow the device to bend into more complicated shapes and navigate difficult vascular environments.
“The soft microcatheter tip is highly innovative and could be key for widespread use of robotics in endovascular surgery,” said Moria Bittmann, Ph.D., director of the NIBIB Robotics Program.
This research was funded by a grant from NIBIB (R01EB033354), the Maryland Robotics Center and the Center for Engineering Concepts Development at the University of Maryland.
This Science Highlight describes a basic research finding. Basic research increases our understanding of human behavior and biology, which is foundational to advancing new and better ways to prevent, diagnose, and treat disease. Science is an unpredictable and incremental process — each research advance builds on past discoveries, often in unexpected ways. Most clinical advances would not be possible without the knowledge of fundamental basic research.
Study reference: Noah Barnes et al. Toward a novel soft robotic system for minimally invasive interventions. International Journal of Computer Assisted Radiology and Surgery (2023). DOI: 10.1007/s11548-023-02997-w